
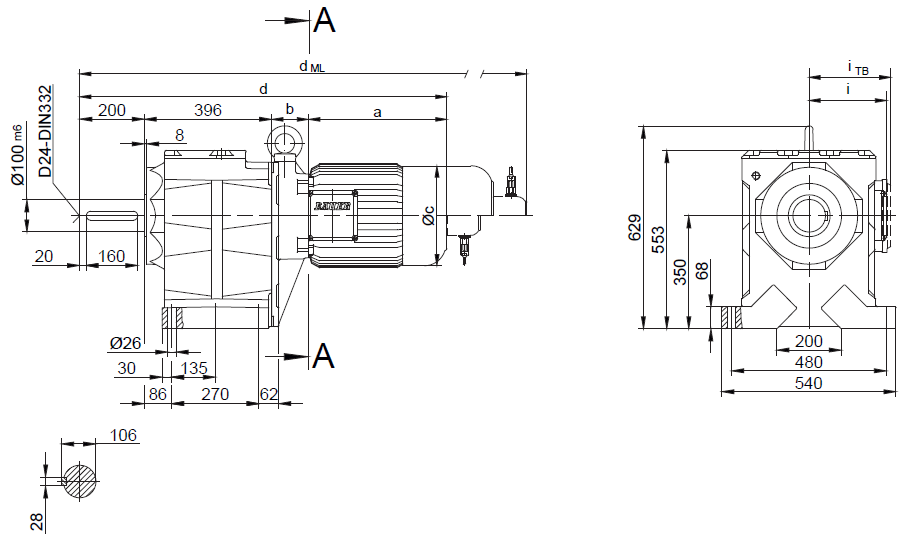
На предприятии заказчика произошёл выход из строя одного из асинхронных электродвигателей мощностью 30 кВт. Вышедший из строя электродвигатель использовался на установке «Косовалковая трубоправильная машина» в составе цилиндрического мотор-редуктора серии BG производства компании BAUER (рис. 1, рис. 2), приводящего в движение один из десяти главных валков (по средствам главных валков осуществляется процесс правки труб, проходящих через установку).

После проведения дефектовки вышедшего из строя электродвигателя были приняты следующие решения:
1. Выполнить замену неисправного электродвигателя.
2. На время проведения замены организовать работу установки на 9-и работающих валках (общее количество валков на установке равно 10) и реализовать возможность исключения любого из установленных на установке электродвигателей главных валков из работы на случай выхода их из строя или для проведения пусконаладочных работ .*
* На момент возникновения неисправности такая возможность на установке отсутствовала.
По пункту №1.
Учитывая конструктивные особенности мотор-редуктора указанного типа, а именно:
— подшипниковый щит электродвигателя одновременно является боковой стенкой (крышкой) редуктора;
— подшипниковый щит (с приводной стороны электродвигателя) конструктивно располагается между электродвигателем и первичным валом редуктора, который посажен в полый вал электродвигателя.
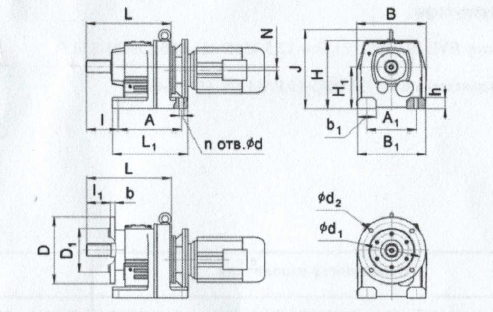
было принято решение о выполнении замены электродвигателя в сборе с редуктором. Для замены был использован аналог мотор-редуктора производства ООО «Техноредуктор Урал» (рис. 3) с электродвигателем компании ООО «Элком».
Основные технические характеристики электродвигателей приведены в таблице 1 и таблице 2.
| Мощность Pn, кВт | 30 |
| Номинальное напряжение Un, В AC: | 400 |
| Схема соединения обмоток | Y |
| Число пар полюсов | 2 |
| Частота, Гц** | 50 |
| Номинальный ток In, A | 56 |
| Номинальная частота вращения, об/мин | 1460 |
| Режим работы | S3/S6-75% |
| cos f | 0.85 |
| Класс нагревостойкости изоляции | F |
| Монтажная позиция IM | B3 |
| Степень защиты | IP65 |
| Температура окружающей среды | -20..40оС |
| Тип датчика температуры | PTC-термистор |
Основные технические характеристики электродвигателя
BAUER.
| Мощность Pn, кВт | 30 |
| Номинальное напряжение Un, В AC: | 380/660 |
| Схема соединения обмоток | ∆/Y |
| Число пар полюсов | 2 |
| Частота, Гц** | 50 |
| Номинальный ток In, A | 59.1/34.0 |
| Номинальная частота вращения, об/мин | 1460 |
| Режим работы | S1 |
| cos f | 0.85 |
| Класс нагревостойкости изоляции | F |
| Монтажная позиция IM | 2001 |
| Степень защиты | IP65 |
| Температура окружающей среды | -20..40оС |
| Тип датчика температуры | PTC-термистор |
Основные технические характеристики электродвигателя
ООО «Элком».
** Работа обоих электродвигателей может выполняться на частотах до 75 Гц.
Основные технические характеристики редукторов приведены в таблице 3 и таблице 4.
| Выходная частота вращения, об/мин | 134 |
| Передаточное число i | 10.9 |
| Выходной момент, Нм | 1280 |
Основные технические характеристики редуктора
BAUER.
| Выходная частота вращения, об/мин | 136 |
| Передаточное число i | 10.79 |
| Выходной момент, Нм | 2100 |
Основные технические характеристики редуктора
ООО «Техноредуктор Урал».
Был произведен монтаж и подключение нового мотор-редуктора (рис. 4), а также произведен его ввод в эксплуатацию.
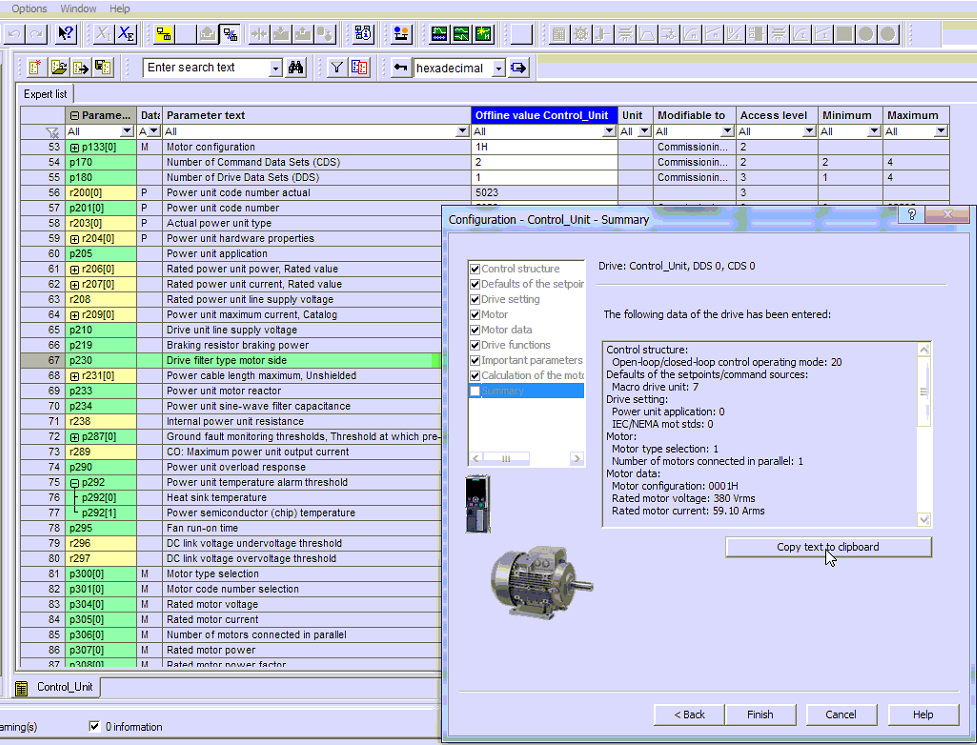
При выполнении ввода в эксплуатацию электродвигателя были произведены:
— редактирование параметров настройки преобразователя частоты, ранее используемого для управления работой электродвигателя производства компании BAUER (тип используемого преобразователя частоты: SINAMICS G120, силовой модуль PM240 6SL3224-0BE33-0UA0, производитель: SIEMENS AG);
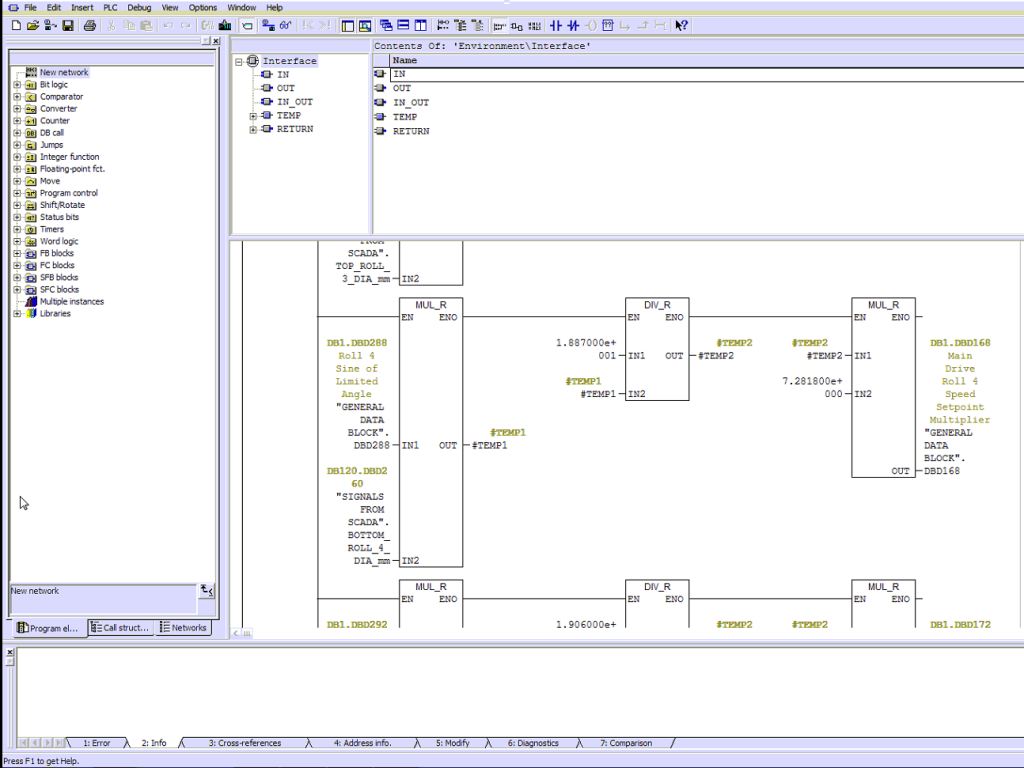
— внесены изменения в проект контроллера установки для корректировки задания скорости вращения электродвигателя в связи с различием передаточных чисел установленного и используемого ранее редукторов (тип контроллера: CPU 315-2 PN/DP, 6ES7315-2EH14-0AB0, производитель: SIEMENS AG);
— проведен контроль параметров работы установленного мотор-редуктора. Для сравнения аналогичные замеры были также произведены на одном из мотор-редукторов производства компании BAUER. При проведении замеров для обоих мотор-редукторов были установлены одинаковые параметры настройки (угол поворота валка, диаметр валка). Результаты проведенных замеров приведены в таблице 5. Мотор-редуктор нового типа обозначен в таблице как «тип 2», мотор-редуктор производства компании BAUER обозначен как «тип 1».

| № п.п | 1 | 1.1 | 1.2 | 2.1 | 2.2 | 3.1 | 3.2 | 4.1 | 4.2 |
| Режим задания скорости | 2 | 20% | 90 м/мин, 50% | 90 м/мин, 80% | 90 м/мин, 99% | ||||
| Тип мотор-редуктора | 3 | Тип 1 | Тип 2 | Тип 1 | Тип 2 | Тип 1 | Тип 2 | Тип 1 | Тип 2 |
| Заданное значение скорости, об/мин (SP) | 4 | 219.2 | 217 | 1095.7 | 1084.8 | 1753.1 | 1735.7 | 2169.5 | 2148 |
| Текущее значение скорости двигателя, об/мин (1/min) | 5 | 219 | 214 — 219 | 1059.4 — 1059.9 | 1085.7 — 1088 | 1753 | 1732 — 1737 | 2169.2 — 2170.0 | 2146.5 — 2149.5 |
| Значение скорости на валу редуктора, об/мин | 6 | 20.2 | 20.1 | 100.6 | 100.6 | 160.9 | 160.9 | 199.2 | 199.2 — 199.4 |
| Выходная частота, Гц (FREQ) | 7 | 7.3 — 7.4 | 7.2 — 7.3 | 36.5 — 36.6 | 36.2 | 58.5 | 57.9 | 72.4 | 71.7 — 71.8 |
| Выходной ток, A | 8 | 19.75 — 20.05 | 20.02 — 20.07 | 20 | 20.43 — 20.47 | 14.66 — 14.8 | 16.95 | 11.54 — 11.65 | 13.65 — 13.7 |
Редактирование параметров настройки преобразователя частоты выполнялось по средствам специализированного программного обеспечения Drive ES – Starter, V4.4.0.3, производитель: SIEMENS AG (рис. 5).
Изменения в проект контроллера установки были внесены с использованием специализированного программного обеспечения SIMATIC Manager STEP 7 V5.6 + SP2, производитель: SIEMENS AG (рис. 6).
По пункту №2:
При выполнении указанного пункта учитывались особенности организации управления работой электродвигателей главных валков, а именно:
— каждый из главных валков установки приводится в движение собственным электродвигателем (используются трехфазные асинхронные электродвигатели);
— работа электродвигателей главных валков выполняется одновременно;
— линейная скорость прохождения трубы через установку задается оператором установки в зависимости от типоразмера и является одинаковой для каждого из валков в точке касания трубы;
— угловая скорость вращения главных валков может отличаться, поэтому задание скорости вращения электродвигателей главных валков производится индивидуально для каждого из них исходя из заданных значений линейной скорости правки трубы, диаметров валков (задаются на панели управления системы визуализации технологического процесса SCADA) и фактического угла поворота валка (определяется по средствам установленных на установке абсолютных энкодеров);
— для управления работой каждого электродвигателя используется отдельный преобразователь частоты (общее количество установленных преобразователей частоты составляет 10 шт.);
— передача сигналов управления осуществляется по средствам интерфейса передачи данных Profibus;
— возможность исключения одного или нескольких электродвигателей главных валков из работы в случае выхода их из строя или для проведения пусконаладочных работ не была предусмотрена изготовителем оборудования.
Для обеспечения работы установки на 9 валках на время проведения замены вышедшего из строя электродвигателя в проект контроллера установки были внесены необходимые изменения. Изменения были внесены с использованием специализированного программного обеспечения SIMATIC Manager STEP 7.
Для реализации возможности исключения из работы любого из электродвигателей главных валков без использования специализированного программного обеспечения (в случае выхода их из строя или для проведения пусконаладочных работ):
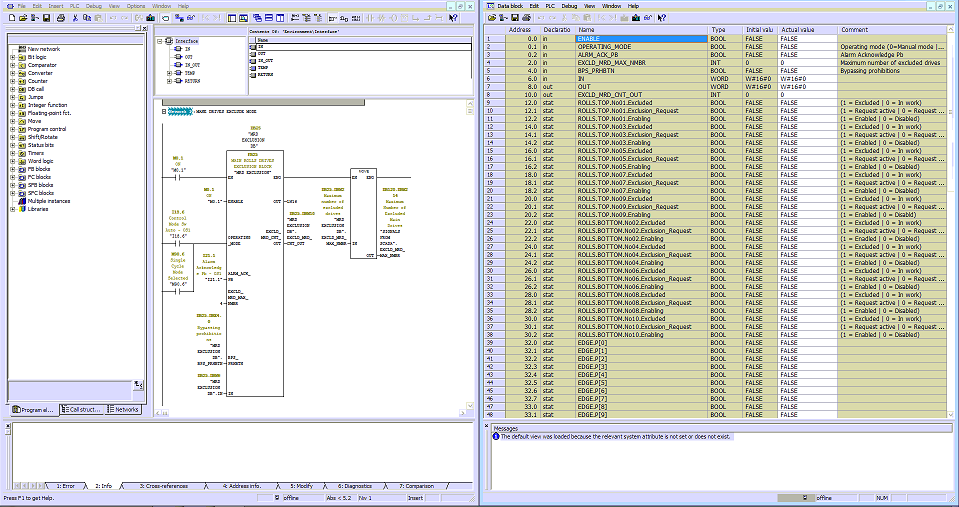
— в проект контроллера были добавлены функциональный блок и блок данных, обеспечивающие возможность исключения, контроль количества и учёта взаимных ограничений, накладываемых на исключение из работы валков исходя из требований технологического процесса (рис. 7);
— в проект системы визуализации технологического процесса SCADA установки были добавлены соответствующие элементы управления (кнопки) и индикации (изменение цвета кнопок и надписей на кнопках) (рис. 8), а также аварийные сообщения (рис. 9).
При внесении изменений учитывались следующие требования:
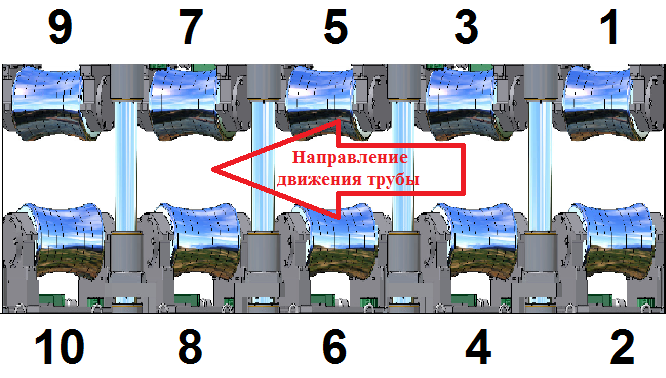
1) Валки*** из первой пары не могут быть исключены из работы в нормальном режиме (ручной, автоматический, полуавтоматический);
2) На исключение из работы валков из второй и третей пары накладываются взаимные ограничения:
— при исключение из работы валка №3 валки №4 и №6 не могут быть исключены из работы;
— при исключение из работы валка №4 валки №3 и №5 не могут быть исключены из работы;
— при исключение из работы валка №5 валки №4 и №6 не могут быть исключены из работы;
— при исключение из работы валка №6 валки №3 и №5 не могут быть исключены из работы.
3) Одновременно может быть исключен из работы только один из валков четвертой и пятой пары, то есть:
— при исключении из работы валка №7 валок №8 не может быть исключен из работы и наоборот;
— при исключении из работы валка №9 валок №10 не может быть исключен из работы и наоборот.
4) Общее количество исключенных из работы валков не может превысить максимально допустимое количество электродвигателей для исключения с учетом описанных выше особенностей.
5) Максимально допустимое количество электродвигателей для исключения определяется исходя из требований технологического процесса (в нашем случае количество было установлено персоналом технологической службы заказчика), задается единожды в качестве входного параметра функционального блока контроллера и не подлежит изменению с панели управления системы визуализации технологического процесса SCADA.
6) Описанные выше запреты на исключение из работы валков могут быть сняты при активации режима технического обслуживания или нажатия соответствующей кнопки на панели управления системы визуализации технологического процесса SCADA. При этом работа установки в автоматическом и полуавтоматическом режимах должна быть запрещена с формированием соответствующих аварийны (предупредительных) текстовых сообщений на панели управления.
7) Право на изменение состояния элементов управления (кнопки) должно быть предоставлено только авторизованным пользователям с правами администратора. Условия авторизации (вход, выход, время автоматического выхода, перечень пользователей для авторизации) остаются без изменений.
8) Должна быть предусмотрена блокировка элементов управления (кнопки) при работе установки в автоматическом или полуавтоматическом режимах, а также в случае выполнения условий наложения взаимных блокировок, описанных выше.
*** Схема расположения валков на установке показана на рис. 10.
Добавление элементов управления и индикации, а также аварийных (предупредительных) текстовых сообщений на панели управления системы визуализации технологического процесса SCADA установки было выполнено на существующий экран по средствам специализированного программного обеспечения WinCC Runtime V7.0 + SP3 + Upd1. Дополнительно была выполнена организация расположенных на экране других объектов (элементы управления, индикации, текстовые поля и т.п.).

